简介
该方法是基于Molchan diagram方法的改进,Molchan diagram简介可看上文:Molchan图表法。以下内容均为原作者提出的观点,本人没有做任何观点上的修改。
背景
原始 Molchan diagram 仅仅只对事件漏报率进行了检验,忽略了警报成功率 的重要性。对于一组警报,只关注事件漏报率或警报成功率是不够的,从地震预报 实际角度出发,警报成功率过低,警报可信度太差,过多的误报类似于“狼来了”; 而过低的事件漏报率则代表极大的未知威胁。这促使本研究构建一个同时考虑警报 成功率与事件漏报率,更为全面的警报性能评估模型。该模型可对警报的事件漏报 率与警报成功率分别进行显著性检验,并针对多指标给出定量化评估,为后续构建 前兆提取模型提供必要的有效性检验手段。
针对事件漏报率的显著性检验
地震与前兆并非“一对一”而是“多对多”的对应关系,为全面评估警报性能,分别从事件和警报角度出发,引入如下定义:
- TP1: True positive 1,与地震对应的前兆数量。
- FP: False positive,不与地震对应的前兆数量。
- TP2: True positive 2,与前兆对应的地震数量。
- FN: False negative,不与前兆对应的地震数量。
- PPV: Positive predictive value,前兆预测成功率,即与地震对应的前兆数量占总前兆的比例。
- FDR: False discovery rate,前兆预测失败率,即不与地震对应的前兆数量占总前兆比例。
- TPR: True positive rate,事件的真阳性率,即与前兆对应的事件数量占总事件的比率。
- FNR: False negative rate,事件的漏报率,即不与前兆对应的事件数量占总事件的比率。
在对警报进行评估时,首先要确保警报在事件漏报率以及警报成功率上均优于随机猜测,因此首先要对警报的事件漏报率和警报成功率分别进行显著性检验。事件漏报率的 p-value 如下式所示:
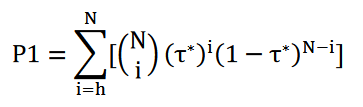
原假设H0:该组警报的事件漏报率与随机猜测无异。当P1 ≪ α,且α ≪ 1时,拒绝原假设,即该组警报从事件漏报率角度要优于随机猜测。
针对警报成功率的显著性检验
原文过于复杂,不做介绍,详情参考原文。
3D Molchan diagram
原始的 Molchan diagram 是事件漏报率关于时空预警区域的函数,只考虑了事件的漏报率而忽略了警报的成功率。然而优秀警报应当是以最小的预警时空域,准确预报更多的事件,同时要保持尽可能高的警报成功率。为满足上述理念,在原始标准的 Molchan diagram 中引入第三个轴用以包含警报的警报成功率信息。3D Molchan diagram 的 x 轴和 y 轴分别代表警报时空域占总时空域的比例τ或 Spatialtemporal correlation window (STCW)以及事件漏报率,新增的 z 轴则为警报误报率 (FDR),FDR=1-PPV。此外,3D Molchan diagram 中还包括针对于事件漏报率和警报成功率的显著性检验,如上文所示。在 3D Molchan diagram 中,最优警报位于原点(0,0,0)代表着该组警报中无误报且无漏报。理论上 x 轴所代表的警报时空域占总时空域的比例是无法等于 0 的,但是随着地震预测预报研究的发展,STCW 会无限接近于0。为评估警报性能,重新定义评估分数如下:
$\operatorname{Loss}=\sqrt{\mathrm{w}_1 * \mathrm{STCW}^2+\mathrm{w}_2 * \mathrm{FNR}^2+\mathrm{w}_3 * \mathrm{FDR}^2}$
上式中 Loss 实际上是(STCW, FNR, FDR)到原点的加权距离,(w1, w2, w3)是根据这三个指标设置的权重,通常w1 = w2 = w3 = 1。(这些权重的设置取决于不同策略的微妙权衡-为最小化警报成本或最 大化与警报相关的地震数量,需要根据社会人民安全和经济考量对警报成功率、事 件漏报率和预警时空域进行加权,但是如何确定最优预测策略是一个涉及社会学、 经济学、伦理学等诸多学科的复杂而富有挑战性的课题,值得深入研究。)在 3D Molchan diagram 中,Loss越高则警报越差。根据事件漏报率的显著性检验结果P1、警报成功率的显著性检验结果P2以及显著性水平α = 0.05,对警报进行如下分类:
- I 类警报:P1≤0.05 且 P2≤0.05。该警报无论从警报成功率或事件漏报率角度都优于随机猜测,是最为理想的警报种类。
- II 类警报: P1>0.05 且 P2≤0.05。该组警报从警报成功率角度是有效的,代表着当警报发生时,人们可以相信并且根据警报进行避险。但是,其在事件漏报率上较差表现会使得人们受到更多漏报事件的威胁。
- III 类警报: P1≤0.05 且 P2>0.05。该组警报从事件漏报率角度是有效的,依据该组警报人们可以尽可能多地避免地震灾害带来的危险,但在警报成功率上较差表现使得其可信度较差。
- IV 类警报:P1>0.05 且 P2>0.05。该组警报无论从警报成功率还是事件漏报率对于地震的预测都无效。
参考论文
[1]张颖. 基于热红外异常的中国大陆地震预测研究[D]. 中国科学院大学.